
EYEBOX™ Motion Planning
Motion planning is one of the main components of a robotic system such as a driverless taxi, a robotic arm, an autonomous aircraft or an autonomous tractor. Following a planned motion is a regular and common activity for a robot. The motion of a robot can be defined by many different variables and parameters depending on the operation. For example, one of the simplest types of motion planning only considers the geospatial location of the robot at any given point in time. A slightly more complex type of motion planning considers geospatial location and the orientation of the robot at the same time. Motion planning in general describes the motion of the robot and how it evolves in space and time.
In a farming example, a few basic motion plans can be defined as the following:
- Driving the tractor from an initial position in the farmyard to the farmyard exit with a certain speed and acceleration profile.
- Driving on the farm road with certain speed and acceleration profile up to the entrance of a field.
- Driving along a straight line in a field while maintaining the speed at a desired value.
Motion planning has been studied and developed extensively in academia and industry over the past few decades and there are a lot of tools and methods available to solve challenging problems in different robotic applications. At Mojow, we are building one of the most advanced motion planning software for farming applications using state-of-the-art methods and algorithms to optimize farming operations. Our motion planning software plans a complete operation for any number of farming machines starting from the farmyard and taking into account detailed logistic variables with customizations available to the farmer to adjust the motion plan.
In this blog post we introduce our motion planning software within EYEBOX™, and provide some insights about its features and capabilities.
How does it work?
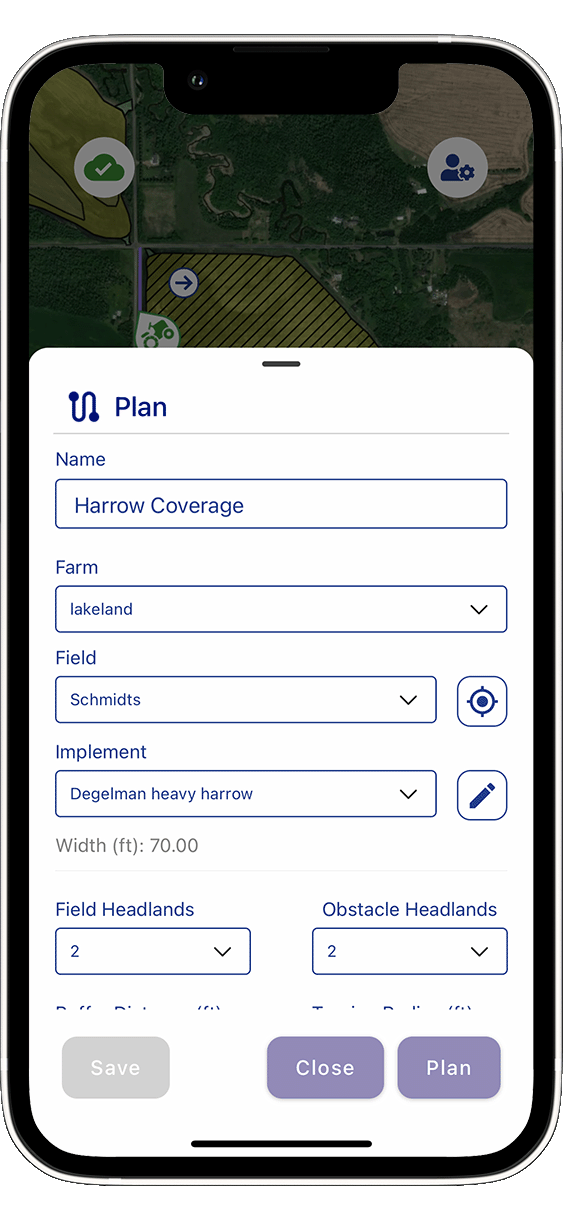
Our motion planning software is available in our EYEBOX™ mobile application and using it is as easy as choosing your parameters of interest by pressing a few buttons.

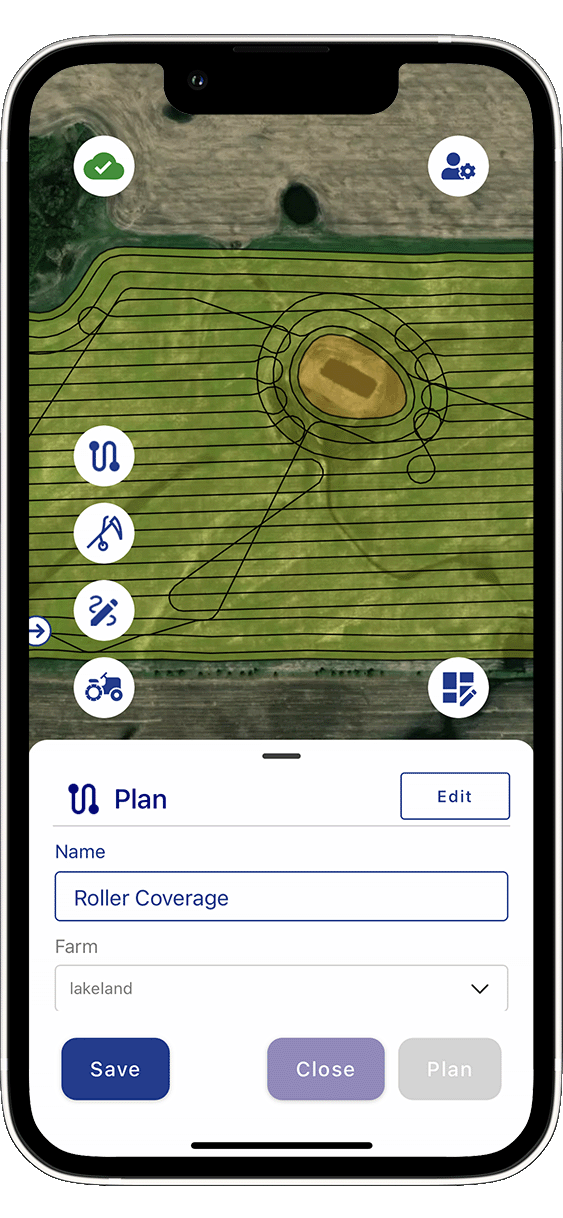
Coverage path planning is the most common motion planning tasks for in field operation. Here, we go through the process for planning a coverage path for any farm field. The main input to our coverage path planner is the field boundary map. EYEBOX can easily map your field boundaries and add them to the EYEBOX mobile app. Field boundaries are generated by a human operator driving your field boundaries one time with any implement attached. Once your field boundary maps are available in EYEBOX, you can start using our motion planning software and plan your missions from the mobile app by following the steps below:
- Select your field
- Press the “Plan” button
- Park the tractor somewhere close to the field entrance or wherever is convenient.
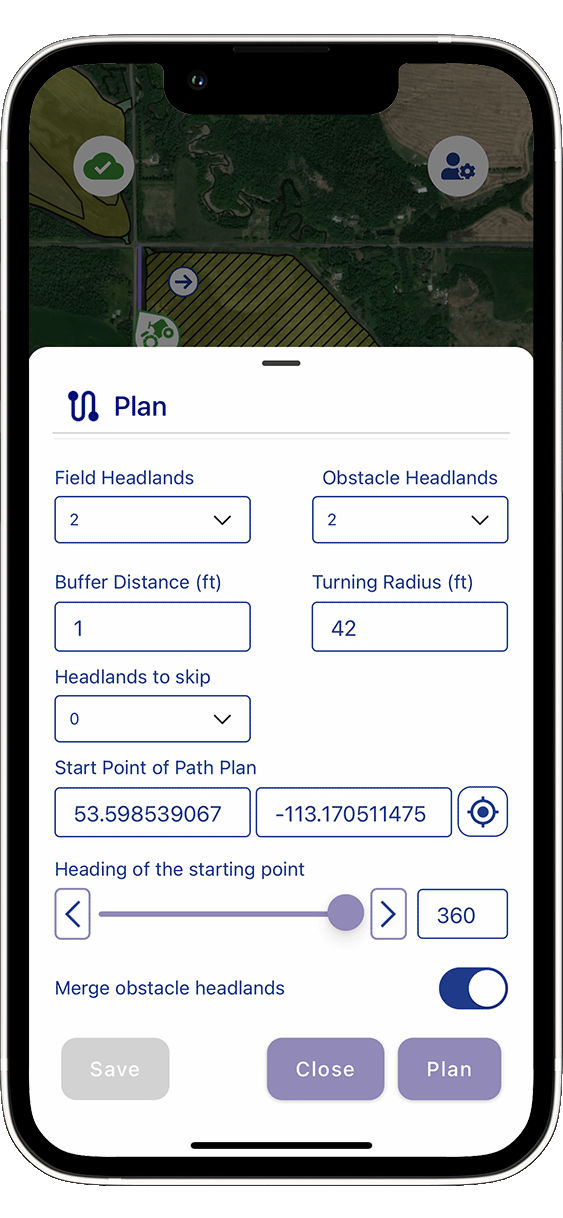
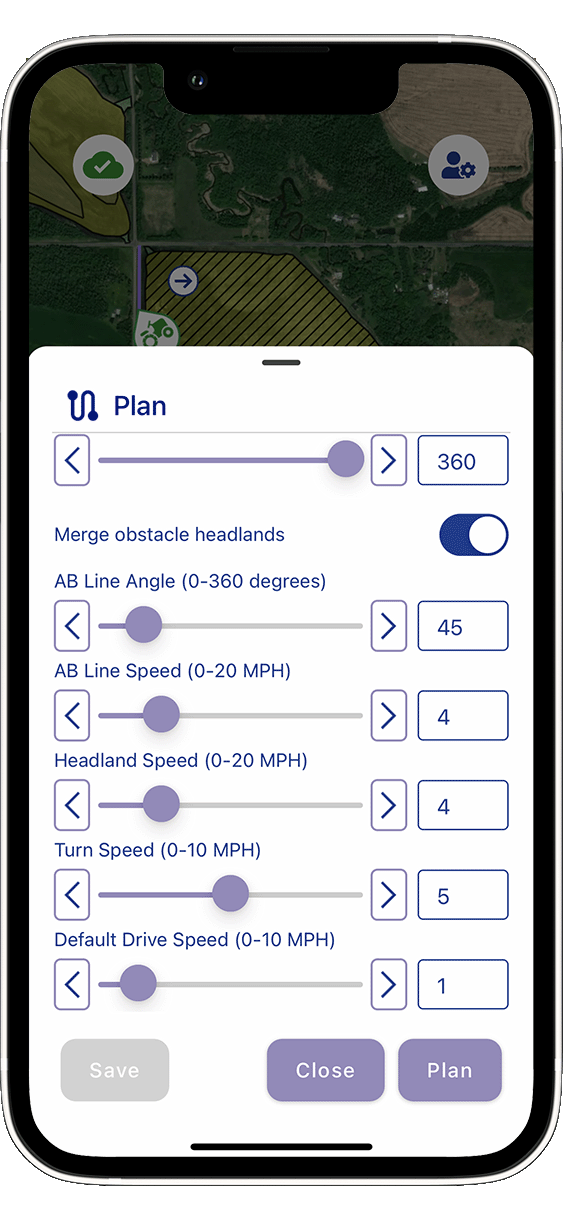
- Adjust the parameters of interest or go with the default selections. You have many customization
options for a coverage plan such as:
- AB line orientation
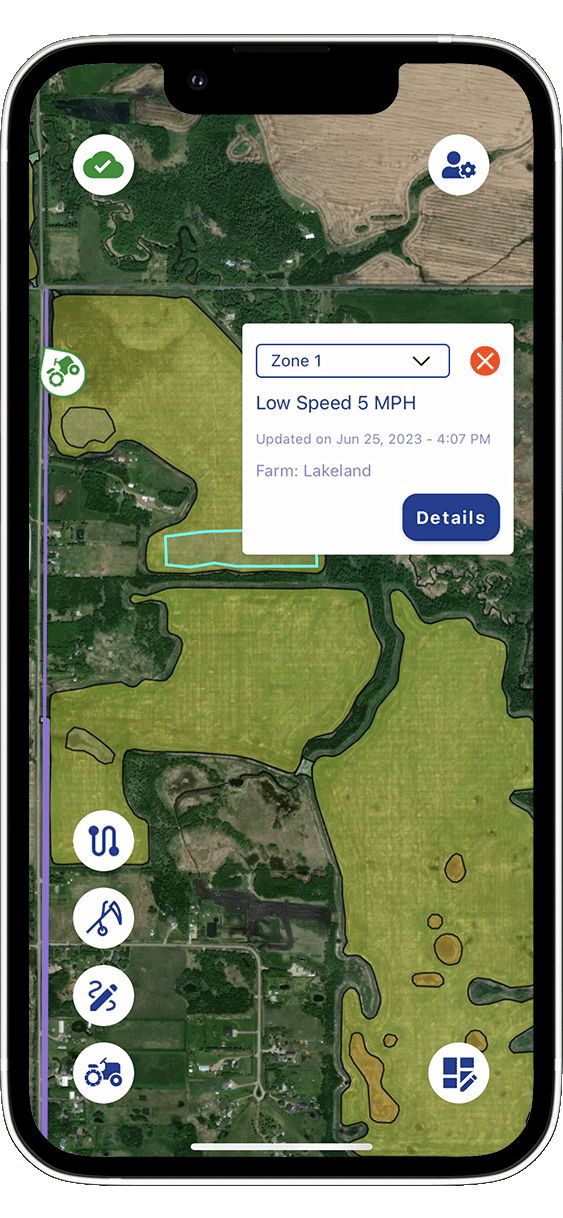
- Adding low speed zones (e.g., known rough areas in the field) by drawing shapes on the map
- Number of field headland passes
- Number of obstacle headland passes
- Choosing start and end locations
- Speed profile for different parts of the coverage plan
- A safety buffer distance from the field edges
- And many more customization options
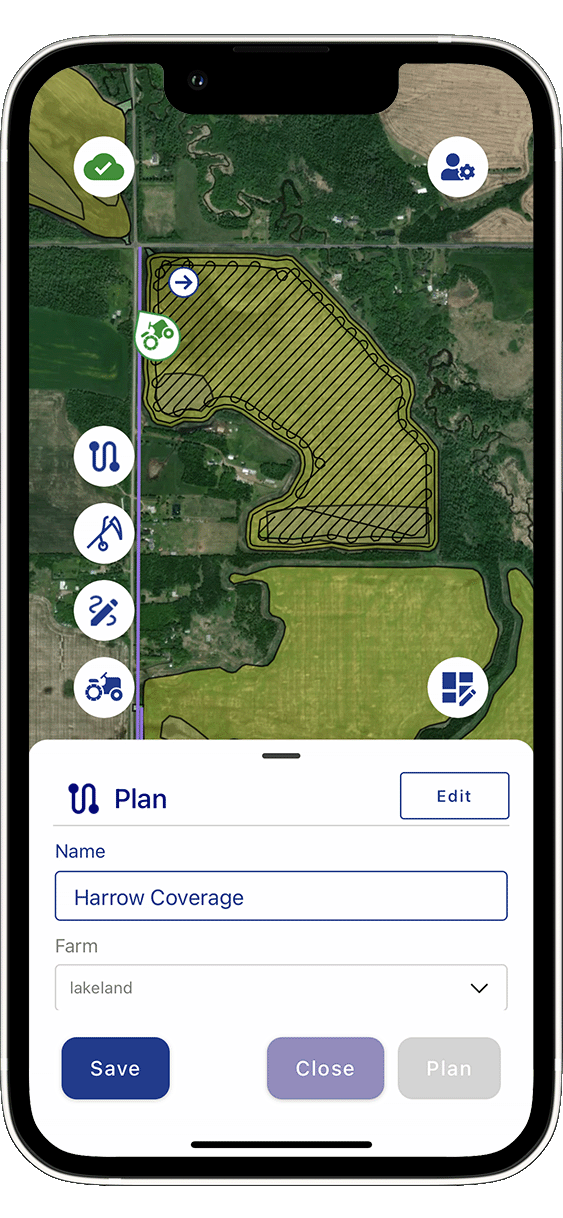
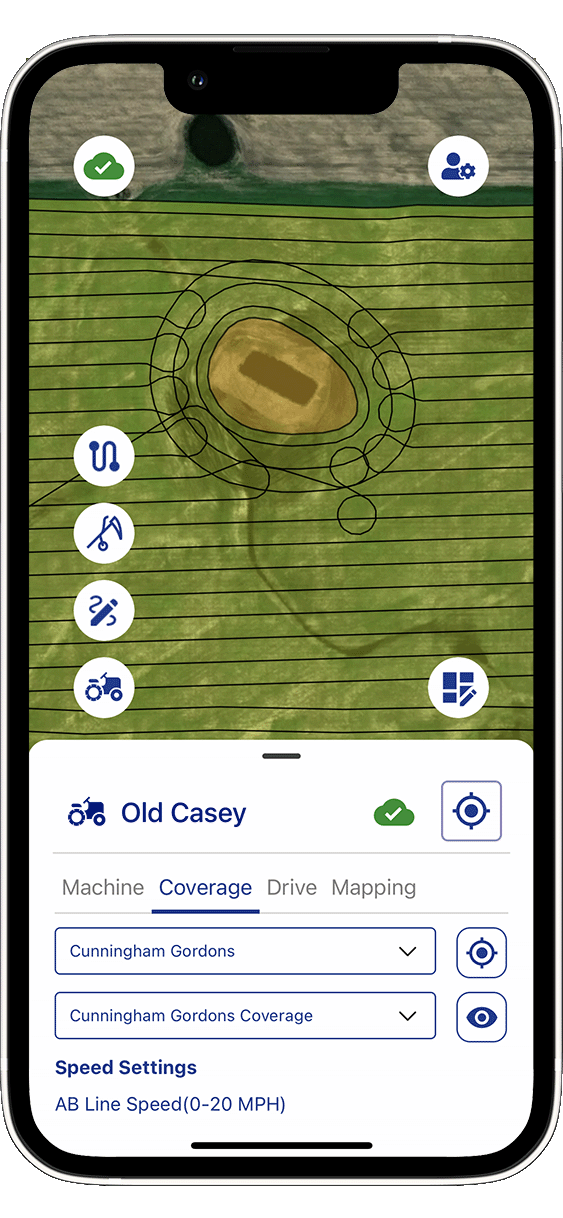
- View the path plan on the map
- If you're happy with the results, press “Save” to save the path plan in the database for use by the autonomous tractor.
- After saving, any user at your farm will be able to view the path plan and use it for any missions.
Advanced features
Our motion planning software has specific features allowing the user to customize their operation however they want.
Offline planning
Offline plans do not change much when the tractor is driving and normally you only need to plan them once. Examples of these offline tasks are:
- Coverage planning which refers to planning a path that covers the whole field with no overlap and zero gaps or misses.
- Mission planning refers to scheduling a number of path plans for longer term operations such as planning missions for multiple fields or planning multiple operations for the same field.
- Fleet mission planning refers to any planning task that involves more than one machine.
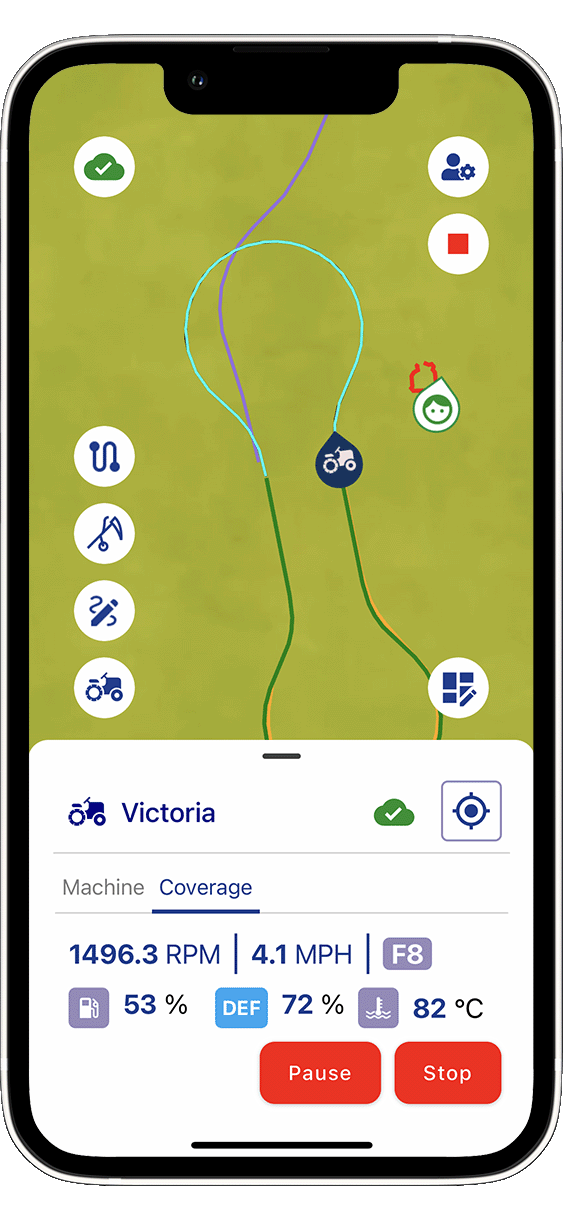
Online planning
Online plans change frequently to account for any unplanned changes in the environment around the tractor or for any possible changes in the mission in real-time. Examples of online planning tasks are:
- Local path adjustments refers to any changes to the path the tractor is following based on the capabilities of the machine and the input path provided by the user. For example, if the user provides a path drawn on the map in the mobile app that is not feasible for the tractor to drive, our motion planning software will adjust the path on the fly when the tractor drives it.
- Obstacle avoidance refers to the adjustments to the tractor's planned path to avoid any detected obstacles and to avoid any collision. Our motion planning software will find an avoidance path if any exists to continue the mission without down time.
- Replanning and optimization refers to constantly searching for a better path plan while the tractor is following existing paths and depending on the changes in the environment around the tractor, our motion planning software will continuously look for more optimized ways to finish the job.
- Fleet formation and collaboration refers to the types of plans that involve the motion of more than one machine. Having one machine follow another machine at a specific distance in a specific formation is one example.
3rd party API
Our motion planning software is a standalone service that can be integrated with any other 3rd party software using our API. For more information about our 3rd party API, please contact our team by emailing info@mojow.ai
Path options
Path options
Obstacle headland passes
Low speed zone drawn on the map
You can view some videos of our team in action on Youtube.